 平台热线
平台热线



1)现场机器人倒挂,如何设置?
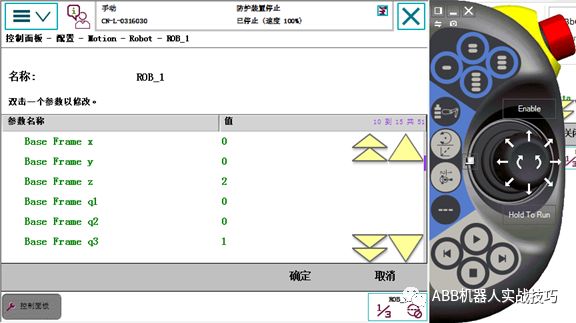
2)示教器,控制面板,主题切换为motion

3)找到robot
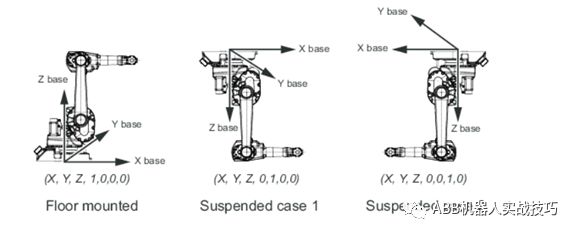
4)此处表示机器人base相对于world的xyz偏移,角度关系如下图
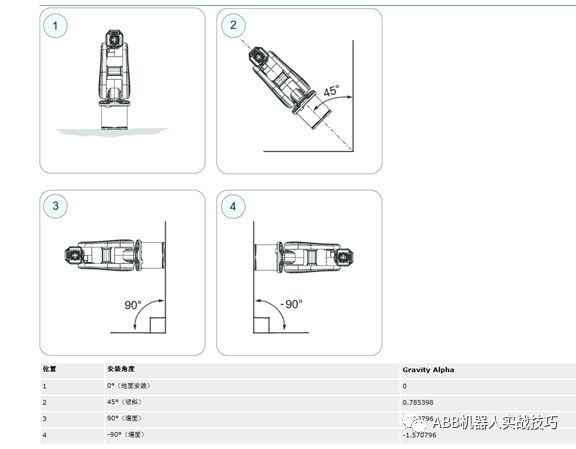
5)根据机器人绕y轴旋转对应角度,修改gravityBeta


6)如果机器人绕x轴旋转,修改gravityAlpha
联系热线:13167285801 联系人:张倩 联系地址:上海市宝山区富联一路98弄6号
技术和报价服务:星期一至星期六 8:00-22:00 ABB机器人集成代理服务商
